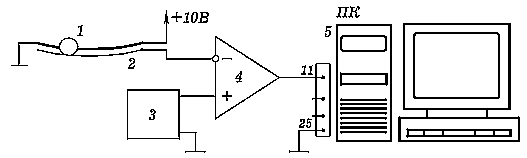
Экспериментальное изучение затухающих колебаний требует определения координаты системы с частотой в десятки раз превышающей частоту исследуемых колебаний. Это позволит получить график зависимости координаты от времени, вычислить скорость и построить фазовый портрет колебаний. Один из возможных вариантов экспериментальной установки изображен на рис.1. Колебательная система состоит из стального шарика 1, катающегося по изогнутым направляющим 2, которые являются резистивным датчиком координаты. Направляющие выполнены в виде металлических стержней, на одну из них надета нихромовая спираль от электроплитки. На концы спирали подано напряжение 10 В, через шарик осуществляется электрический контакт. Выходное напряжение с датчика, снимаемое со второй направляющей пропорционально координате шарика.
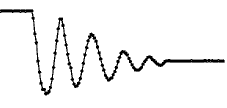
Аналого--цифровой преобразователь состоит из генератора линейно-импульсного (пилообразного) напряжения 3, компаратора 4 и персонального компьютера 5. Частота линейно-импульсного напряжения fi должна в десятки раз превышать частоту f колебаний исследуемого сигнала с датчика. Когда исследуемое напряжение, подаваемое на инвертирующих вход компаратора больше, напряжения на неинвертирующем входе, --- на выходе напряжение низкого уровня, соответствующее логическому 0. В момент равенства этих напряжение --- на выходе появляется логическая 1. С приходом нового пилообразного импульса все повторяется снова. На выходе аналого-цифрового преобразователя возникает последовательность прямоугольных импульсов частотой fi, длительность которых зависит от входного напряжения. Эти импульсы подаются на 11 вывод LPT--порта персонального компьютера, который строит график зависимости координаты от времени. В качестве резистивного датчика координаты нами использовалась спираль на 220 В, 400 Вт. Чтобы исключить дребезг контактов параллельно датчику включают конденсатор емкостью 20 мкФ. Генератор линейно-импульсного напряжения собран на тиристоре ВТ169D. В качестве компаратора используется операционный усилитель К544УД2А. При необходимости его выход согласуют с LPT-портом компьютера с помощью транзистора КТ315А. Опыты производились с персональными компьютерами 80486 и Celeron, операционные системы MS DOS и Windows 98. Ниже представлена программа 1, обрабатывающая сигнал с АЦП и строящая график зависимости координаты шарика от времени. В цикле repeat uu:=u; u:=port[889]; delay(15); if u<>127 then x:=x+1; until (uu=127)and(u<>127); переменная x увеличивается от 0 до тех пор, пока состояние LPT--порта, соответствующего ячейке ОЗУ с адресом 889, не становится равным 255 (не равно 127). Получающиеся значения x выводятся на экран в виде графика (рис. 2), в текстовом виде, и/или сохраняются в файле. uses crt, graph; Программа 1 var DriverVar, ModeVar, ErrorCode, u, uu, x, time : integer; Procedure GraphInit; begin DriverVar:=Detect; InitGraph(DriverVar,ModeVar,'c:\bp\bgi'); ErrorCode:=GraphResult; if ErrorCode<>grOK then Halt(1); end; Begin GraphInit; repeat x:=0; repeat uu:=u; u:=port[889]; delay(15); if u<>127 then x:=x+1; until (uu=127)and(u<>127); time:=time+1; circle(3*time,400-x*1,1); circle(3*time,400-x*1,2); until KeyPressed; CloseGraph; End.
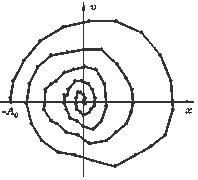
Для получения фазовой кривой в режиме реального времени используется программа 2. С помощью оператора v[i-1]:=round((x[i]-x[i-1]+x[i-1]-x[i-2])/2); вычисляется значения скорости шарика и они сохраняются в массиве. Результат представлен на рис.3. uses crt, graph; Программа 2 var v, x: array[1..640] of integer; i, DriverVar, ModeVar, ErrorCode, u, uu, time : integer; Procedure GraphInit; begin DriverVar:=Detect; InitGraph(DriverVar,ModeVar,'c:\bp\bgi'); ErrorCode:=GraphResult; if ErrorCode<>grOK then Halt(1); end; Begin GraphInit; repeat i:=i+1; x[i]:=0; repeat uu:=u; u:=port[889]; delay(10); if u<>127 then x[i]:=x[i]+1; until (uu=127)and(u<>127); time:=time+1; v[i-1]:=round((x[i]-x[i-1]+x[i-1]-x[i-2])/2); circle(50+2*x[i-1],240-6*v[i-1],2); line(50+2*x[i-1],240-6*v[i-1],50+2*x[i-2],240-6*v[i-2]); until KeyPressed; CloseGraph; End.
Полученная фазовая кривая больше похожа на ломанную вследствие погрешностей, неизбежно возникающих при измерениях координаты и численном нахождении скорости шарика. Майер Р.В. Использование АЦП для изучения колебаний. --- Научное обозрение. --- N 6. --- 2006. --- с. 66-67. ВВЕРХ
|